@article{alfasly2023OSRE,
author={Alfasly, Saghir and Al-Huda, Zaid and Bello, Saifullahi Aminu and Elazab, Ahmed and Lu, Jian and Xu, Chen},
journal={IEEE Transactions on Intelligent Transportation Systems},
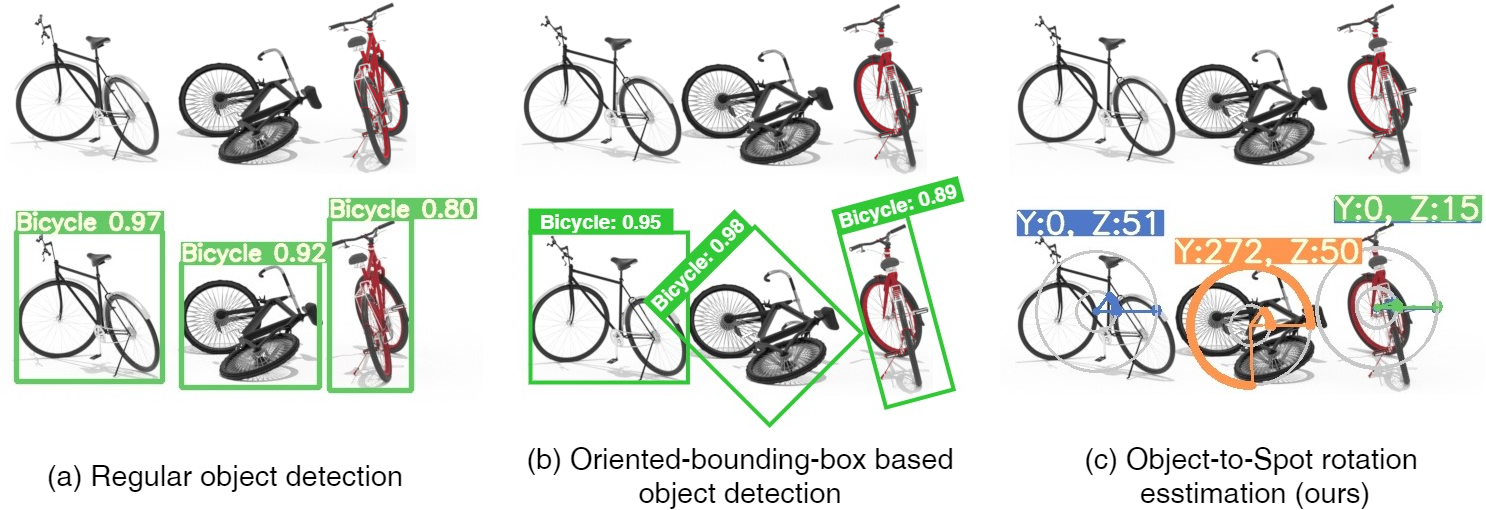
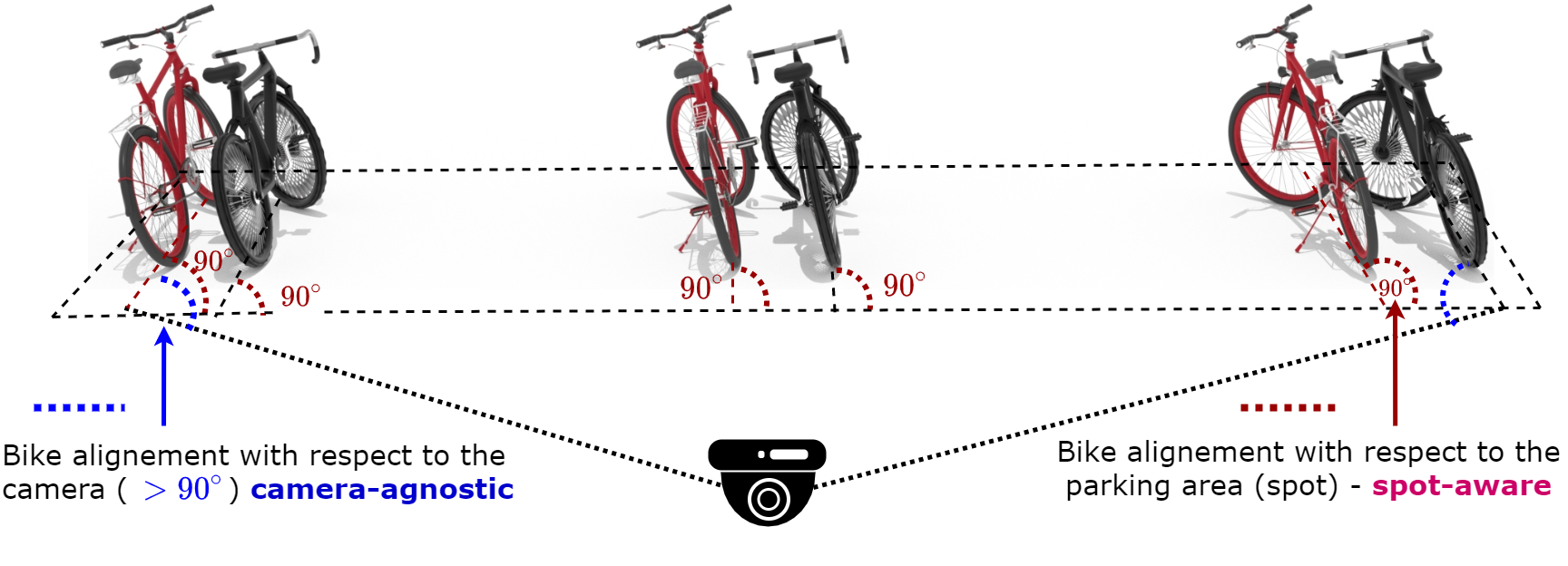
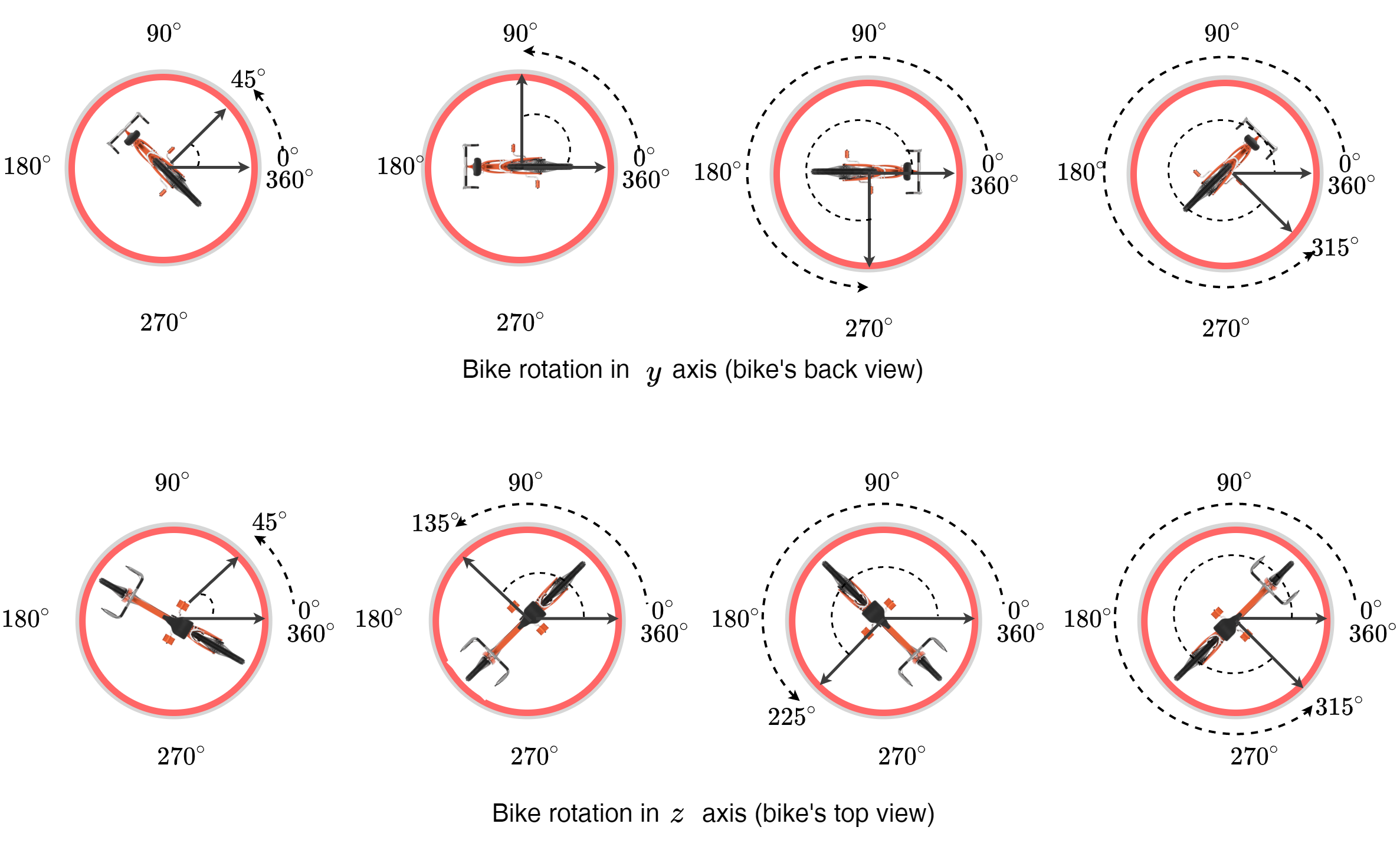
title={OSRE: Object-to-Spot Rotation Estimation for Bike Parking Assessment},
year={2023},
volume={},
number={},
pages={1-10},
doi={10.1109/TITS.2023.3330786}}
This web page template is borrowed from here.